Regulated Motor
When you need the extra Torque…
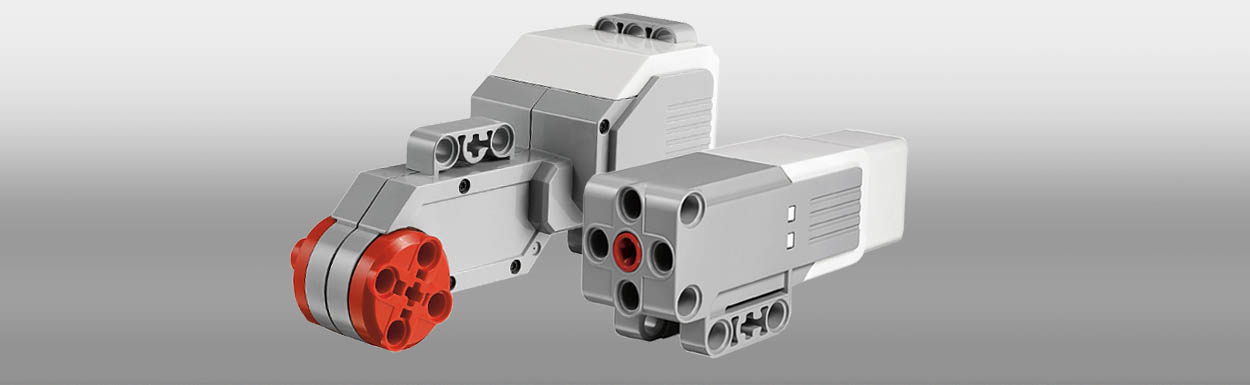
The EV3 Large Motor gives more torque than a Spike Prime medium motor. Such large motor is useful in projects requiring the extra force such as robots for lifting heavy objects.
With QikEasy EV3 Spike Prime Adapter, you can easily use your existing EV3 Large Motor for this kind of projects.
Of course, the adapter also supports converting EV3 medium motors.
Reuse EV3 Construction Plans. Why it matters?
For teachers trying to upgrade their curriculum from EV3 to Spike Prime, one of the biggest challenges is that they cannot reuse existing EV3 construction plans. Because Spike Prime motors (and sensors) have different physical form factor than their EV3 counterparts, one cannot build models with old construction plans. Now, with QikEasy Adapter, it becomes possible to reuse these existing construction plans. With our adapter, teachers can ease the transition by only updating the programming to use the new Word Editor.
How to use it on Spike Prime or Robot Inventor?
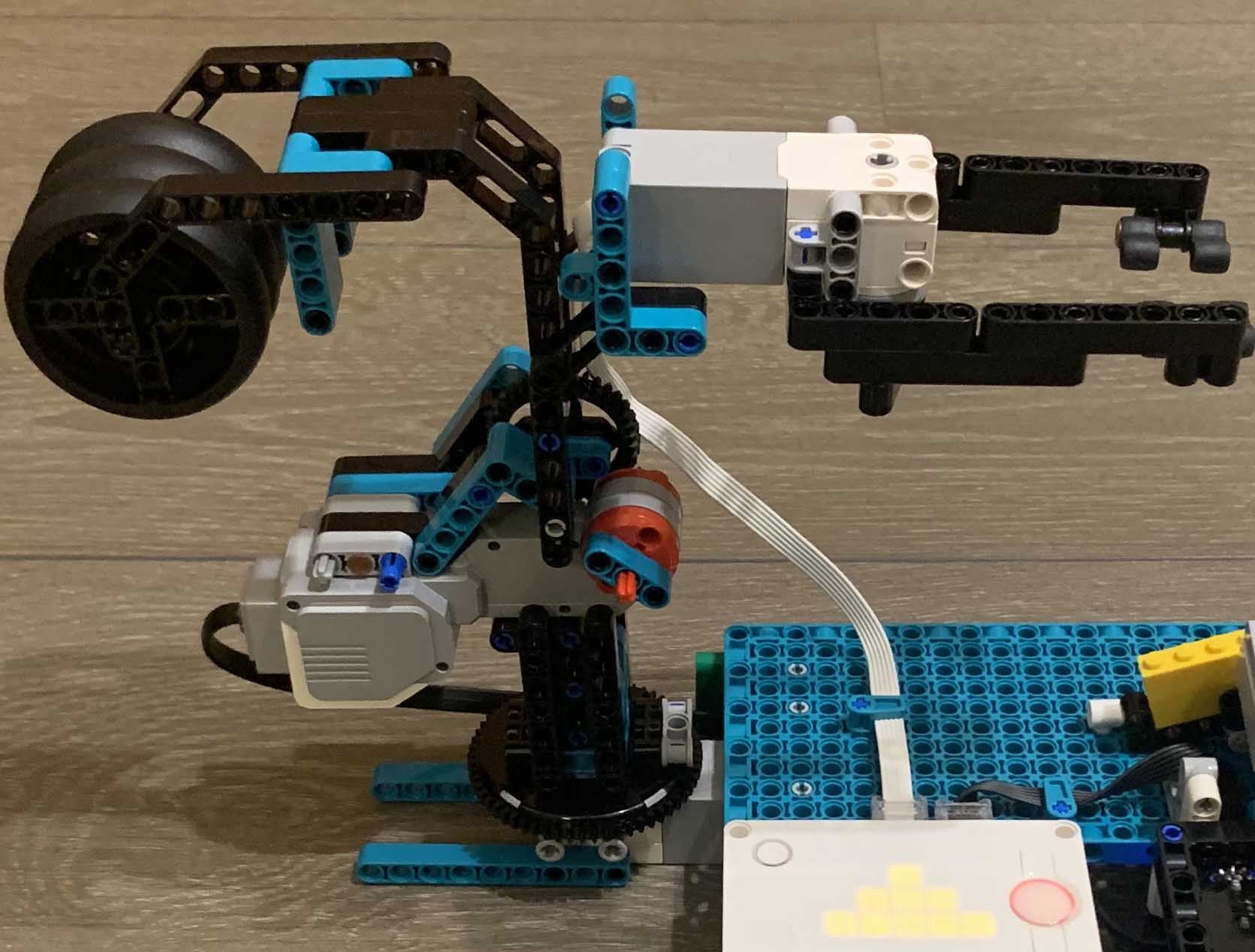
- Connect your EV3 motor to the bigger socket on the QikEasy Adapter.
- Connect one end of a Spike Prime cable to the smaller socket on the QikEasy Adapter.
- Connect the other end of the Spike Prime cable to one of the 6 ports on the Spike Prime (or Robot Inventor) hub.
- Your Spike Prime or Mindstorms Hub will detect your EV3 Motor through the QikEasy Adapter as a Spike Prime Motor.
- Program your hub to use the EV3 Motor in exactly the same way as a normal Spike Prime motor.
Programming with EV3 Motors through a QikEasy Adapter:
Through the use of a QikEasy Adapter, your EV3 Motor emulates a regular Spike Prime motor. As such, you can use the EV3 Motor in exactly the same way as a normal Spike Prime motor.
Difference from a regular Spike Prime motor:
The only difference is that an EV3 Motor doesn’t support absolute angular position detection. EV3 Motor only supports relative positioning. With the EV3-motor-emulated Spike Prime motor, when you retrieve its absolute position, it will return the same value as the relative position. Note that with relative position, at boot-up time, angular position would be reset to zero. So before powering up, if you rotate your motor axle to the zero degree position then boot up, the motor’s absolute position value should behave very similar to a Spike Prime motor.
Tips for Avoiding Motor Shakes when working with Heavy Loads:
A common mistake that many novice users make is running the motors at full speed. Due to the momentum of the heavy load, one often notices shaking or oscillation when trying to stop the movement after the rotation, this is especially obvious when the “hold position at stop” option is used. Luckily, there are a several strategies we can deploy to prevent this undesirable behavior:
- In most applications whether you are rotating or lifting a robotic arm, it is usually acceptable to run the motor at a speed as slow as 5% or 10%. This is easiest method to resolve the issue. By reducing the speed, you can often completely get rid of the shaking.
If the motor’s rotation distance will be long and you think 10% speed is too slow, you may go with a hybrid speed approach. You will first run the motor at a higher speed to reach the middle point towards the destination. After that, you will rotate the motor to the final destination at 5% or 10% speed.
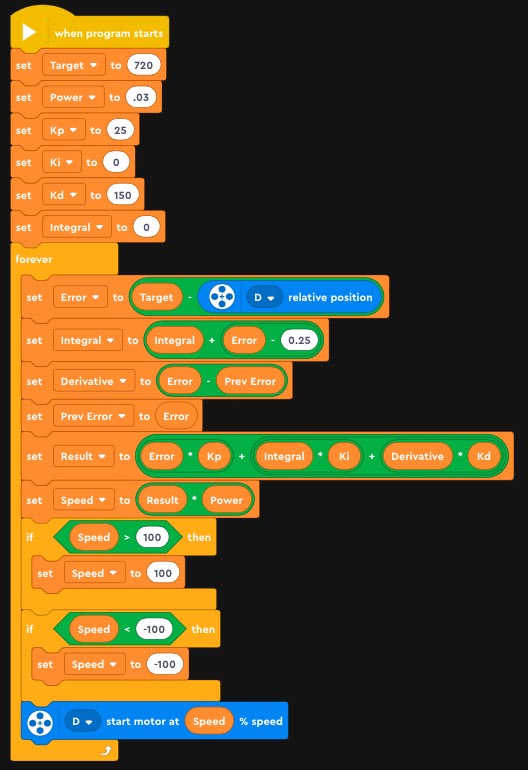
You may implement your own PID controller. This is more involved as it will require a loop to have feedback control of the motor, which also makes the flow of your program much more complicated. Generally, this method is not necessary and you should try method #1 and method #2 first.
An example of Motor PID Controller