IR Seeker Usage with Spike Prime
QikEasy IR Seeker now fully supports Word Block for Spike 2 & 3, Python for Spike 2 & 3, and Python for Pybricks on Spike Prime.
The page describes how to use IR Seekers with LEGO Spike Prime robots. For usage with i2c compatible robots, please refer back to this page.
Naming Convention for the First and Second IR Seeker boards
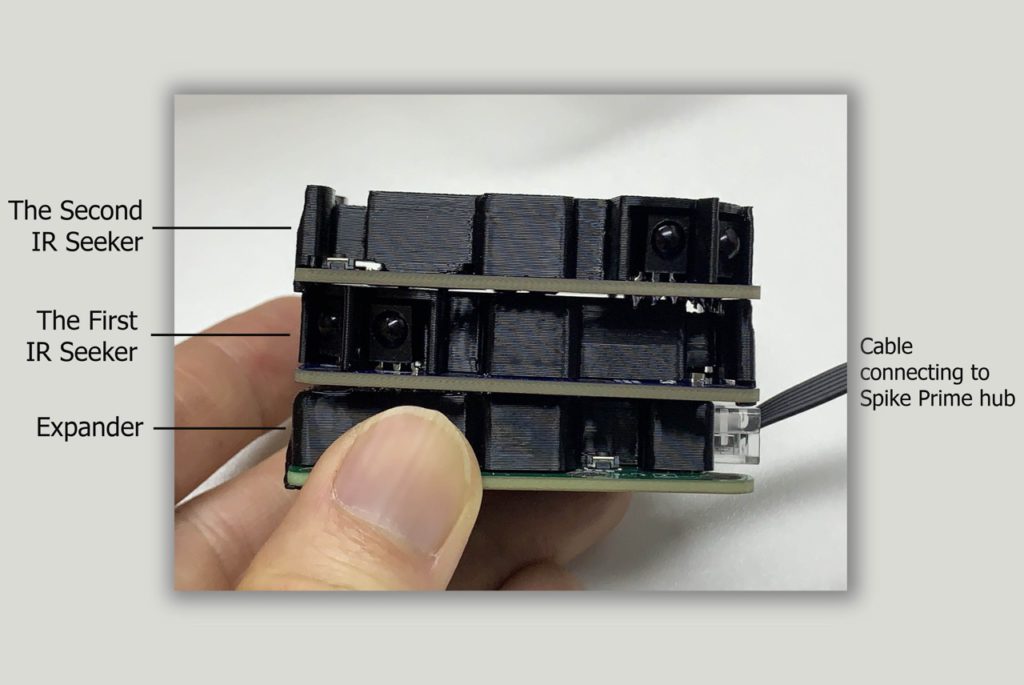
As you have already seen from the “Hardware Setup” documentation page, a QikEasy IR Seeker stack consists of a series of boards chained together. The first board connected to your Spike Prime hub is always the QikEasy Expander board.
After that, the first board (which should be an IR Seeker board) connected to the Expander board is called the First IR Seeker. If you have another IR Seeker in the chain, this last IR Seeker connected to your First IR Seeker is called the Second IR Seeker. The names are based on the order of the boards in the chain. It doesn’t matter if the connections are made through stacking or through the 16-pin cable.
The naming convention is important to recognize because how the measurements for the two IR Seekers are delivered through different attributes of the emulated Spike Prime Color Sensor. You will need to know which attributes are for which IR Seeker.
Measurements for the First IR Seeker
- Angular Direction is presented as “Reflection” value in the simulated Color Sensor.
- The value ranges from 0 to 36. When decoding the value, user must divide the value by 4.
- Angular Direction is presented as “Reflection” value in the simulated Color Sensor.
- Signal Strength is presented as “raw Red” value in the simulated Color Sensor.
- When using Spike App 3 or Python or Pybricks, the value ranges from 0 to 1024.
- When using Spike App 2 with Word Blocks, the value ranges from 0 to 255.
- Signal Strength is presented as “raw Red” value in the simulated Color Sensor.
Measurements for the Second IR Seeker
- Angular Direction is presented as “raw Blue” value in the simulated Color Sensor.
- The value ranges from 0 to 36.
- For Spike App 3 and for Python (including Pybricks) users, when decoding the value to the range 0 to 9, user must divide the value by 4.
- For Spike App 2 with Word Blocks users, there is no need to divide the value by 4.
- Angular Direction is presented as “raw Blue” value in the simulated Color Sensor.
- Signal Strength is presented as “raw Green” value in the simulated Color Sensor.
- When using Spike App 3 or Python or Pybricks, the value ranges from 0 to 1024
- When using Spike App 2 with Word Blocks, the value ranges from 0 to 255.
- Signal Strength is presented as “raw Green” value in the simulated Color Sensor.
Usage Optimization
IR Seeker is optimized for short range direction detection. Once the range gets farther, inaccuracy may arise due to factors such as IR reflections bouncing back from the wall. We suggest teams to not only solely rely on IR Seeker for directing the robot to catch the ball. The robot should somehow be self-aware of its own location on the field. When it detects that the ball is at the far end of the field from the robot, one possible algorithm is to move the robot straight to the half field with the ball before following the direction detected by IR Seeker.
Troubleshooting Tips
If your IR Seeker device(s) do not seem behave as you expect, try these troubleshooting tips:
- Make sure a Color Sensor appears on the port that the QikEasy Expander is connected to.
- Make sure the connections between the IR Seeker and Expander boards are tight. Push the boards all the way into the other board on the stack.
- Make sure the Spike Prime cable that links the Expander to the Spike Prime hub is securely connected.
- Make sure your IR Ball is turned ON with the correct settings (set to RC-J-PULSE), and the battery level is good.
- On the QikEasy Expander board, make sure the “Wireless” switch is set to “Normal” position.
- Make sure your IR Ball is turned ON with the correct settings (set to RC-J-PULSE), and the battery level is good.
- Despite our careful manufacturing and calibration, minor hardware variations in individual IR components can cause slight angular offsets or value inaccuracies. To ensure maximum precision with your robot, you should tune your user program for your specific QikEasy IR Seekers to counteract any directional offsets.
If you still cannot solve your problem or if you suspect it may be an issue with our products, you may email us at info@novavolta.com to report the issue.